





















ЛњЦїШЫСаБэДѓШЋБрМБОЖЮЛиФПТМ
the Mars Science Laboratory (2010)
VIPeR Battlefield Robot (2007)

Ishiguro Actroid (October 2006)

Ri man (2006)
AI@50 (2006)

bionic prostheses (2006)

EveR-1 (2006)

M Tran III (2005)

HUBO (2005)

Wakamaru (2005)

Hybrid Assistive Limb (2005)
NUVO (2005)

robot jockeys (2004)
Robolympics (2004)

Snuggling Ifbot (2004)

DARPA Grand Challenge (2004)

the Robosapien (2004)

QRIO (2004) conducted the Tokyo Philharmonic Orchestra
MER-B Opportunity (January 25, 2004)

Actroid ReplieeQ1 (January 2004)

MER-A Spirit (January 4, 2004)

PatrolBot (2003)


ApriAlpha (2003)
the Robot Hall of Fame (2003)


iRobot's Roomba (2002)
PaPeRo (2001)

A.I. (2001)
Cyborgs (2001)

Sony Dream Robot (2001)
Robodex (2000)

BLEEX (2000)

ASIMO (2000) is a humanoid robot

Pino (1999)
Extreme machines: Incredible robots (1999)

Aibo (1999)
Personal Robots released the Cye robot (1999) it performed a vairety of household
chores, such as deliver mail, carry dishes, and vacuum. It was created by Probotics Inc.
Deep Space 1 (1998)

Lego Mindstorms (1998)

Kismet (1998)

Friendly Robotics' Robomow (1997)

RoboCup (1997)

Mars Pathfinder (July 4, 1997)

Deep Blue (May 11, 1997) became the first computer system to defeat a reigning
world champion in a match under standard chess tournament time controls

Furby (1997)

Honda P3 (1997)
RoboTuna (1996) was created by David Barrett at MIT

Honda P2 (1996)

Citizen's Eco-Be minibot (1995)

Kaiko (1995)

Robot Wars (1994-2002)

Seiko's Monsieur (1993)

Honda P1 (1993)

Cog (1993)
Evolutionary robotics (early 1990s)
the NASA Space Telerobotics Program (1992-1997)

Ambler (1990)
Robodoc (1990) performed a hip-replacement operation on a dog (1992 on a human patient)
Robotic surgery (1988)
the first HelpMate robot went to work (1988) at Danbury Hospital in Conneticut
K. Eric Drexler's Engines of Creation (1986)

Honda E0 (1986)
the NASA Automation and Robotics Program (1985)
created by the General Robotics Corp. the RB5X was a programmable robo (1985) it had infrared sensors, romote audio/video
transmission, bump sensors, and a voice synthesizer. It had software that could enable it to learn about its environment

the Omnibot 2000, a toy robot (1985) was created by the Tomy Kyogo Company Inc. It
was controlled by a hand-held remote control or through programs stored on magnetic tape

Ichiro Kato created WABOT II (1984) that read music and plays an electronic organ
the Cyc project (1984)

Odex 1 (1984)

Ichiro Kata built the WL-10R (1983) it had more degrees of freedom then its predessor. It could walk
laterally, turning and walking forward as well as backward. It could take a step every 4.4 seconds
the Heathkit Corporation designed Hero Jr. (1982) it was intented to be a home companion. It had
an alarm clock, and it could sing several songs. Additional programs were stored on 250 cartridges

Canadarm (1981)

the Robotics Institute (1979)
SCARA (1978)

Unimation's Puma 560s (1978)

Kuka's Famulus (1973)

Mars 2 Prop-M Rover (1971)
Uncanny Valley (1970)

Shakey the Robot (1970)

the Stanford arm (1969)
HAL 9000 (1968)

Surveyor 3 (April 20, 1967)

ELIZA (1966)
the first expert system, DENDRAL (1965) was created by a team at Stanford. The team was
lead by Ed Feigenbaum. The robot was designed to execute the accumulated knowledge of experts

the Rancho-Arm (1963)
General Motors installed the first industrial robot, the Unimate, on a production line (1962)

Unimate (1961)
Evolutionary programming (1960)

Hopkins Beast (1960)
John McCarthy and Marvin Minsky founded the Artificial Intelligence Laboratory at the Massachusetts Institute of Technology (1958)
the Dartmouth Summer Research Conference on Artificial Intelligence (1956)
Industrial robotics (1954)

a teleoperator-equipped articulated arm (1951) was designed by Raymond Goertz for the Atomic Energy Commission

the Turing test (1950)
I, Robot (1950)

the Transistor (December 1947) was invented at Bell Telephone Laboratories
by John Bardeen, Walter Houser Brattain, and William Bradford Shockley

the ENIAC (February 1946) short for Electronic Numerical Integrator And
Computer, was the first all-electronic computer designed to be Turing-complete
George Devol patented a general purpose playback device (1946)
for controlling machines using magnetic recordings
cruise missiles (1944)
the word robotics was first used in print by Isaac Asimov, in his science fiction short story Runaround (1941)
cybernetics (1940s)

Goliath tracked mine (1940)

Elektro and Sparko (1940)

Charly Chaplin's Modern Times (1936)

Metropolis (1927)

Rossum's Universal Robots is a science fiction play by Karel Čapek (1921)
which introduced and popularized the term robot
Unmanned aerial vehicles (1917)
automatic household machines (early 20th century)

Boilerplate (1893)
Frank Reade Jr. built the Electric Man which is more-or-less an electric version of the Steam Man (1885)
John Brainerd creates the Steam Man apparently used to pull things (1865)

Mary Shelley's Frankenstein (1818)
the Jacquard loom (1801)

The Turk (1770)

Jacques de Vaucanson's Digesting Duck (1739)

Leonardo's robot (1495)

the Lullian Circle (1305)

Al-Jazari's Automata (1205)
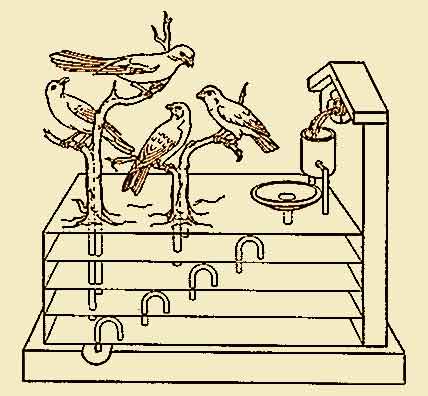
the automata of Ancient Greece

in Greek mythology, Hephaestus (the god of metal work) created mechanical
servants, including intelligent female slaves and automated furniture
